PhD Projects: Carnegie Mellon
As part of the Ethics in Robotics Course at Carnegie Mellon University. Teams of two students were teamed to create a one day course, for ongoing classes to incorporate the discussion of ethics into the main course subject matter. The deliverables for our one lesson module can be downloaded here.
Masters Projects: Carnegie Mellon
Bio-Inspired Soft Robotics
Bio Inspired robotics takes ideas from nature without restricting engineers to copy every aspect of nature. Building off of research originally published in Huang et al. our group studied the ability of a soft robot to navigate on land and in water using actuators inspired by skeletal muscle pairings.
Team mates: Tess Hellebreakers, Zachary Pattersn, Peter Ahn, Yunsik Ohm
Huang, X., Khalid Jawed, M., Batzorig, A., & Majidi, C. (2018). A Versatile and Robust Soft Rolling Robot Driven by Shape Memory Alloy. In APS Meeting Abstracts.
Mechatronics Project: Window Washer Bot
Window Washer Bot was a competition for my Mechatronics class at Carnegie Mellon University during the Spring of 2018. Along with Maddie Miller, Sarah Georges, Rishabh Kumar and Theo Lee I worked to create a prototype of a robot which could be scaled up to clean skyscrapers. While all members worked on all parts of the design my most important contribution was the adhesion subsystem.
Bicycle Model of a Buggy Car
For my Linear Control Systems Class we were tasked with designing a controller in python in order to keep a CMU Buggy Car to follow a preplanned trajectory (position graph in blue). Minor amounts of noise was added to the system for the controller to be tested. The velocity along the trajectory (xd graph) was up to the user and the departure from the lane (y, minDist graph) was to be kept under 6. The controller could only change the rate of the wheels turn (deltad, graph not shown) and the Force (F graph) applied. The controller to stay in the lane was a Linear Quadratic Regulator and the controller to control the velocity was a proportional integral derivative controller. In addition, bang bang control was used to get the buggy started and around the sharpest turn.
DIY Design & Fabrication
DIY Design & Fabrication is a class at Carnegie Mellon University which aims to teach drawing, rapid fabrication, and design to masters engineering students. The class involves 6 projects and 6 tasks where the students demonstrate what they have learned.

Undergraduate Projects: University of Maryland, College Park
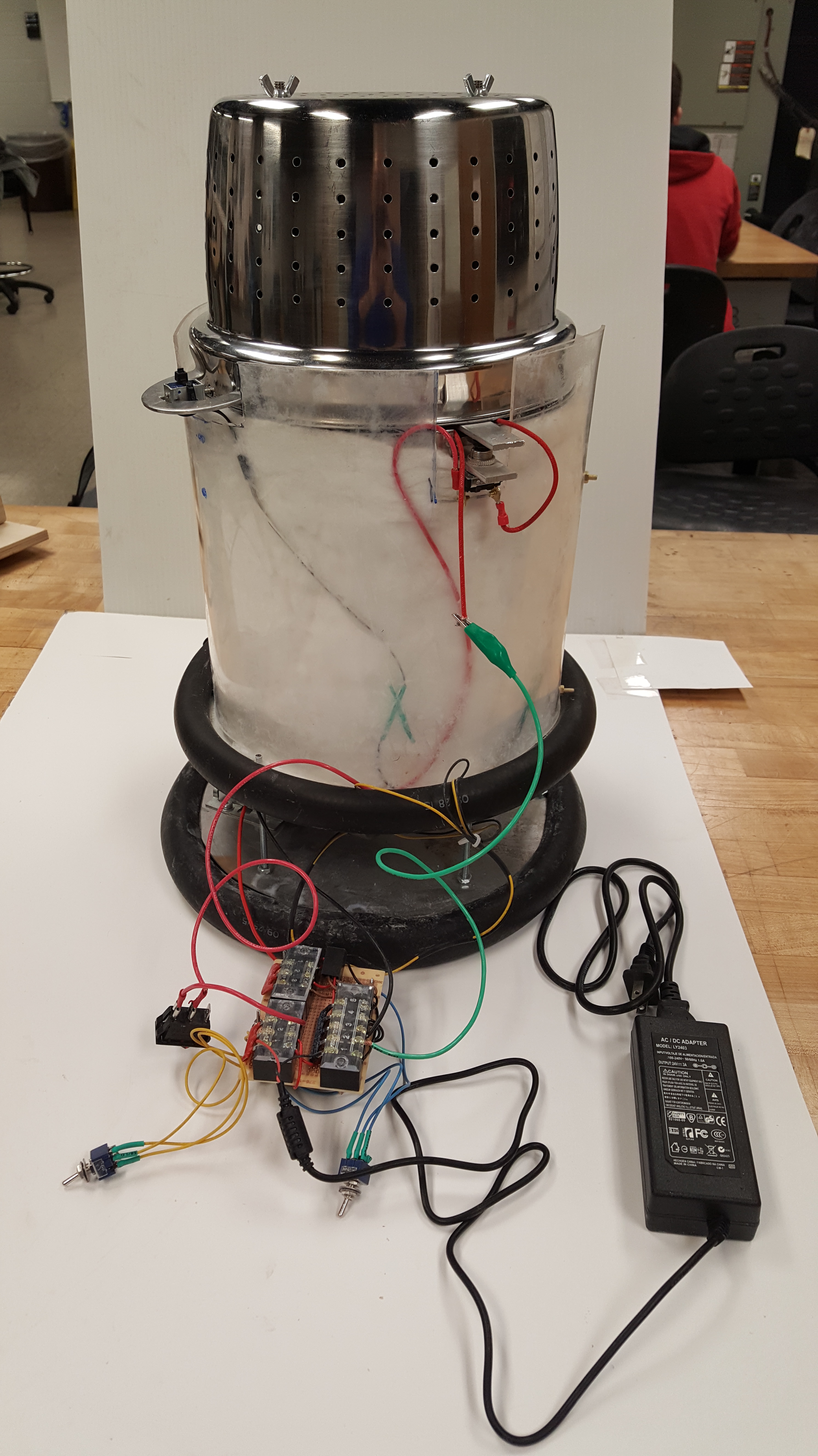
Capstone Design Project
During my capstone at the University of Maryland I collaborated with five students to develop an indoor composter. After completing the design process we came up with the design detailed in the design sketch. The team then tested the amount of force it would take to cut each of the items commonly used in composting. This information guided our design of the comprehensive prototype which was able to minimize odor reduce the weight of the composted material and increase the rate of composting.
Iguana Bot
guana Bot was a project for my Bio-Inspired Robotics Class at the University of Maryland: College Park. For the robot, a team of three students, including myself picked a video of an animal to inspire the design of a four legged robot. The team used transformation matrices and Newton-Euler method to map the objects kinematics and kinetics. Finally the team used 3-d printing, motors, and an Arduino micro controller to build the final design. The iguana robot below was the fastest robot in the class to complete the course on the carpet terrain competition and was able to complete all of the terrain courses.

{kind=link}
{kind=link}